编译/VR陀螺
近日,硬件开发平台 DFRobot 正式推出面向 Apple Vision Pro 开发者的空间输入配件 seeMote Cap 与 seeMote Cube。两款产品旨在帮助开发者将现实世界中的实体工具、控制器和物理操作接入 visionOS 应用程序,为培训、教育、工业维修、设计评审等场景提供更加自然的空间交互方式。
Apple Vision Pro 当前主要依赖眼动追踪、手势识别和语音作为核心输入方式,而 seeMote 系列则试图进一步扩展 Vision Pro 的交互边界,让开发者能够将真实世界中的物体直接映射到空间计算应用之中。
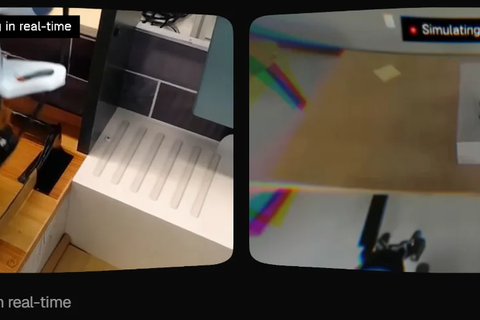
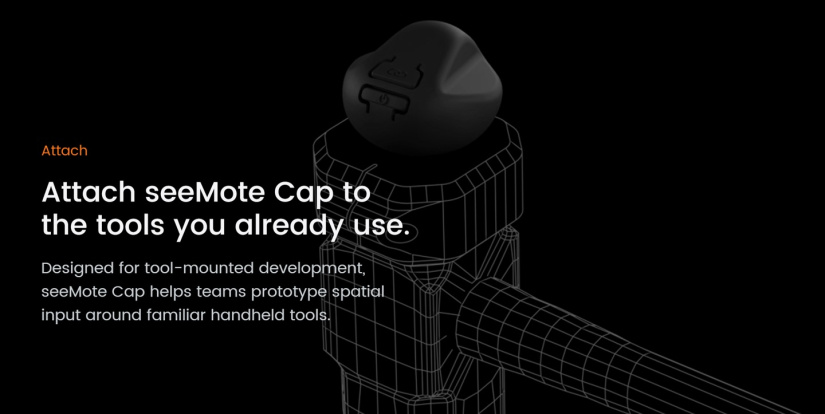
其中,seeMote Cap 是一款可安装在实体物品上的空间追踪模块,支持六自由度(6DoF)追踪能力。开发者可将其安装在笔、螺丝刀、实验器材或教学模型等工具上,从而在 visionOS 应用中实时获取其空间位置与运动轨迹。
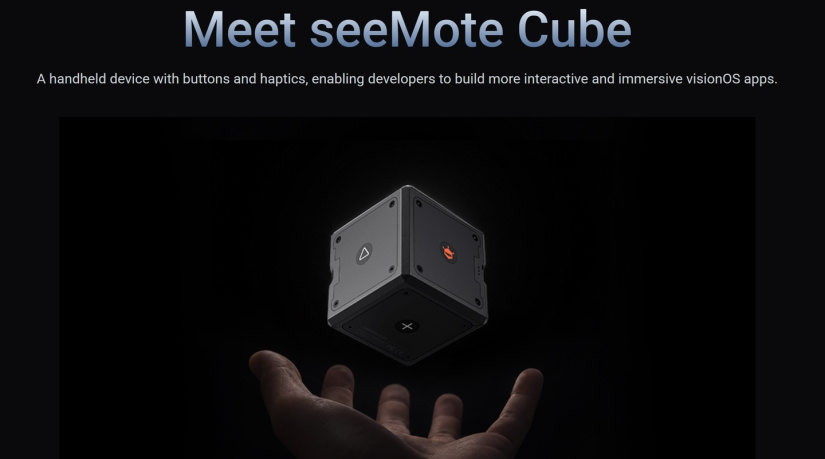
另一款产品 seeMote Cube 则定位为手持式空间控制器,除了支持 6DoF 空间追踪外,还集成了 6 个可编程按键以及触觉反馈功能,可用于对象选择、模式切换、导航控制以及任务确认等交互场景。
DFRobot 表示,两款产品可单独使用,也可组合部署。例如在工业维修培训场景中,开发者可以通过 seeMote Cap 追踪维修工具的运动轨迹,同时利用 seeMote Cube 完成菜单操作、步骤确认以及触觉反馈提示,从而构建更接近真实工作环境的XR培训体验。

从应用场景来看,seeMote 系列主要瞄准企业级与专业级空间计算市场,包括工业培训、医疗模拟、实验室教学、设计评审、数字孪生以及企业协同等领域。
例如在维修培训场景中,系统可实时判断用户是否按照正确路径使用工具;在医疗模拟训练中,可追踪器械运动轨迹并与标准流程进行比对;在设计评审场景下,则可通过实体控制器完成三维模型的选择、旋转和标注操作。
技术层面,两款产品均基于 6DoF 空间追踪能力构建,并支持蓝牙及 USB-C 连接。开发者能够将设备采集到的位置、姿态、按键以及触觉反馈信息映射至visionOS 应用逻辑中,从而实现更丰富的空间交互设计。
DFRobot 认为,随着空间计算逐渐向生产力和企业应用场景扩展,仅依赖手势交互已难以满足复杂工作流需求。相比悬空手势操作,实体输入设备能够提供更高的操作精度、更明确的反馈以及更符合现实工作习惯的交互体验。
据了解,seeMote 系列计划于 2026 年秋季正式上市,主要面向 Apple Vision Pro 开发者、XR 应用团队、教育机构以及企业培训市场开放。
来源:electromaker