编辑/VR陀螺
NVIDIA GTC 2026大会上,PICO与NVIDIA联合发布沉浸式机器人遥操作开源方案Isaac Teleop,旨在通过标准化XR遥操作与数据采集流程,加速“物理人工智能(Physical AI)”与具身智能的发展,为全球机器人开发者提供一套标准化、高保真的数据生产管线。
该方案将PICO XR硬件能力与NVIDIA Isaac平台深度融合,重点解决机器人训练数据获取成本高、系统开发碎片化以及仿真与真实环境割裂等长期行业难题,为全球开发者提供统一的数据生产与操控框架。
在传统机器人遥操作流程中,不同硬件设备(VR头显、手套、定制控制器等)往往需要单独适配,导致开发成本高、复用性差。同时,数据采集过程中数据流不同步与信息损耗,也会影响后续模型训练效果。而大规模真实机器人数据采集成本高昂,使得行业长期依赖仿真数据,难以实现高质量闭环。
针对上述问题,PICO x NVIDIA Isaac Teleop提供了一套统一的标准化遥操作架构。
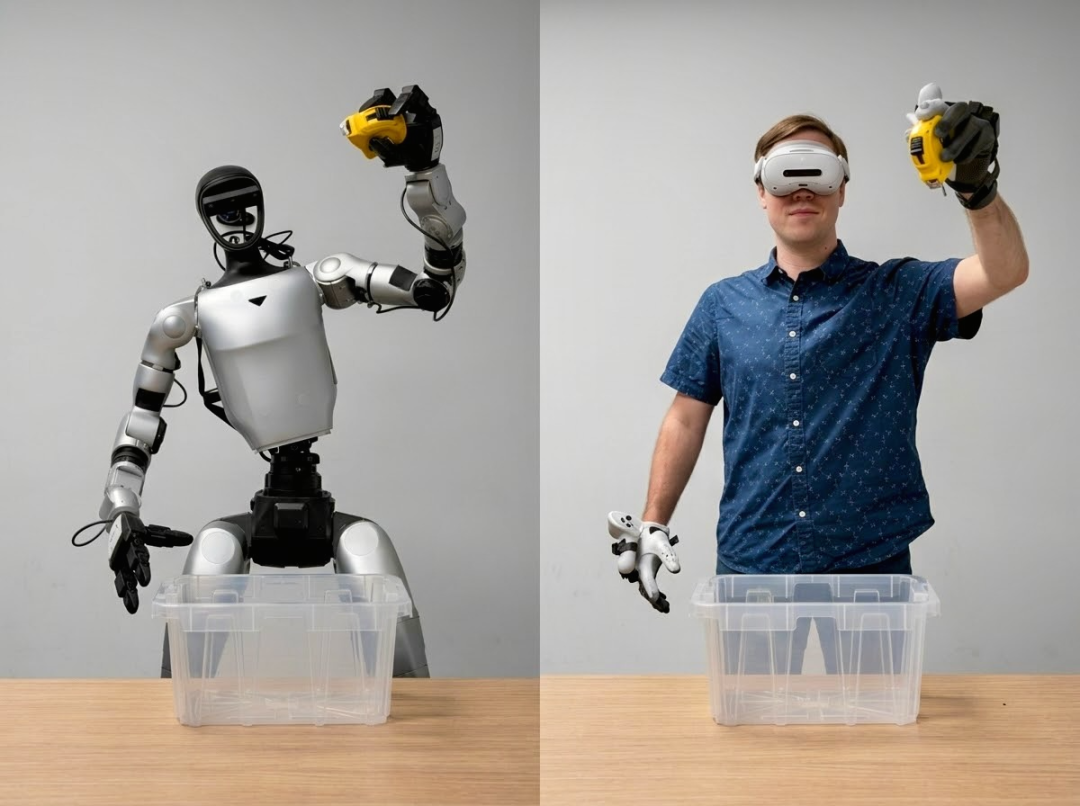
- 统一的设备接口 (Unified Device Interface) 开发者可以通过PICO 4 Ultra及其手柄、PICO体感追踪器(Motion Tracker)直接对机器人进行6-DoF操控。系统支持将人类侧的控制输入精准重定向(Retargeting)到各类机器人末端执行器或灵巧手上。
- 从仿真到现实的无缝切换 (One Stack for Sim and Real) Isaac Teleop提供统一的运行时环境,无论是在Isaac Lab的虚拟仿真中,还是通过Isaac ROS操控真实物理机器人,开发者只需使用同一套代码栈。
- 将第一视角视频转化为训练数据 PICO设备支持使用头显上的相机和视频透视接口,录制第一人称的操作数据。同时,Isaac Teleop即将上线的Ego4Robo功能将进一步简化数据采集流程,极大地填补了人类与机器人之间的“Embodiment gap”。
- 云端企业级遥操 PICO还展示了将Isaac Teleop方案通过火山引擎部署在云端,让企业客户从头显端的浏览器登录,打开云端的Isaac仿真环境,就可以进行机器人遥操作,并自动记录数据和处理。
值得关注的是,PICO在现场还预览了下一代头显,代号为Project Swan。该设备预计将具备双眼4K显示、更低延迟传输与更强空间计算能力,并将与Isaac Teleop深度集成,用于进一步提升遥操作精度与实时性。

目前,该方案已支持PICO 4 Ultra与WebXR接入,并已开源相关工具链,开发者可通过GitHub获取完整代码与文档。
PICO先前为机器人社区贡献的XRoboToolkit已经服务百家机器人组织,并获得了IEEE SII 2026最佳论文奖。全球开发者可利用PICO设备构建自己的机器人数据集。和英伟达联手开源技术和生态合作,PICO进一步将机器人遥操作从现实到仿真、从本地到云端拓展了应用范围。
- PICO XRoboToolkit:xr-robotics.github.io
- Nvidia Isaac Teleop开源代码库:github.com/NVIDIA/IsaacTeleop
来源:PICO开发者